





























Programming module
EFORT INTELLIGENT EQUIPMENT CO.,LTD
31
After completing the above procedures, run the program in the “automatically run
program” mode (refer to Section 4.2.2), and you can find that the robot moves from an initial
posture to the zero position (except for the sixth axis), after which the program ends and the
robot stops.
New Variable
Now repeat the above trajectory 6 times, which can be realized by adding variables and
"loop command/FOR" command.
Process 1: Create variables
Process 2: Set the initial value of the variable
Process 3: Insert the FOR command in the program tree (the FOR command requires this
variable as an command parameter).
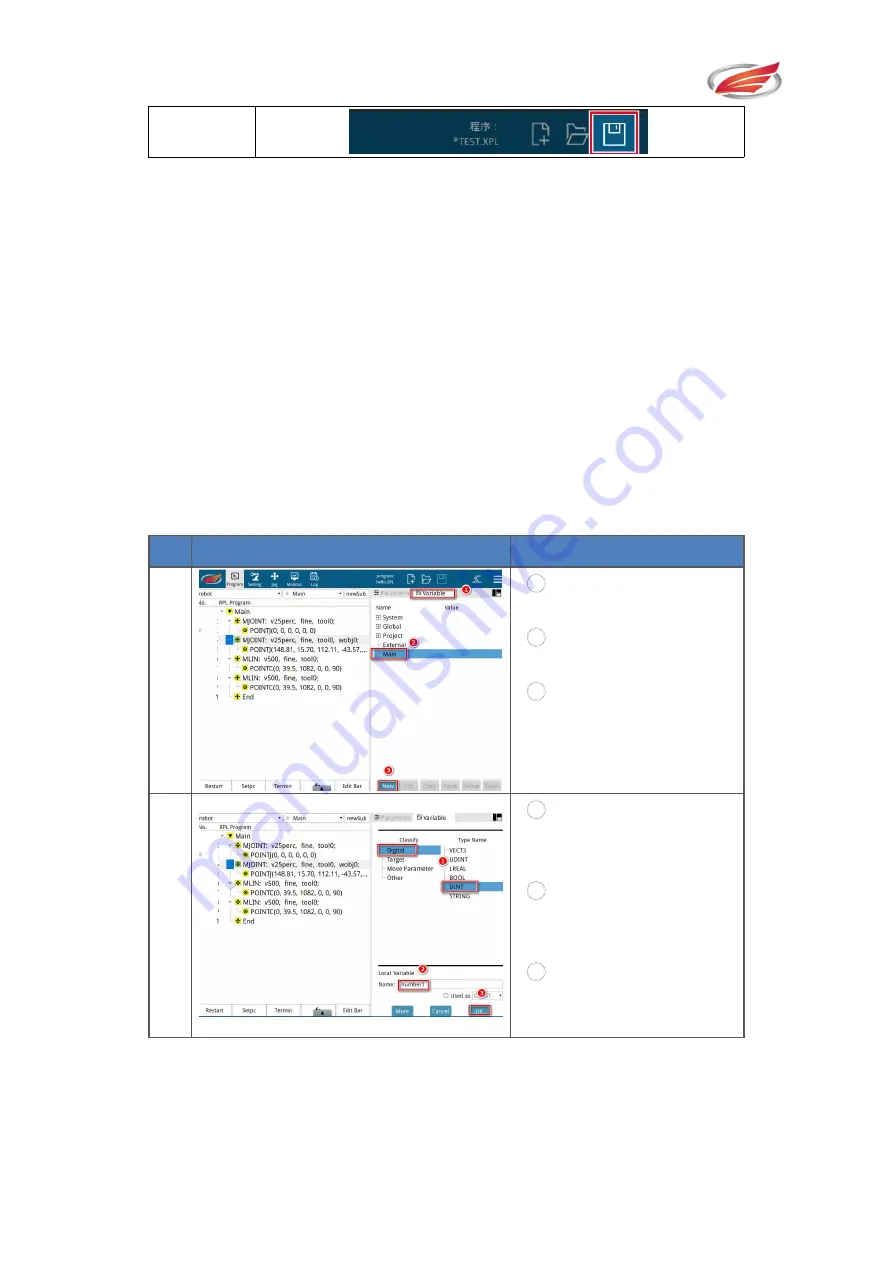
Procedure 1: The procedures of “create variables” are as follows:
#
Demonstration
Remarks
1
1
Click on the "Variable"
tab;
2
In the tab page, select
"Main" item;
3
Click on the "New"
button.
2
1
Click on the "digital/
DINT" item and set the
variable type to DINT;
2
Modify the variable
name to "iter” (You can
also use the default ‘i_0’)
3
Click the "OK" button
to finish creating the
variable.


































































