





























Monitor
EFORT INTELLIGENT EQUIPMENT CO.,LTD
230
1
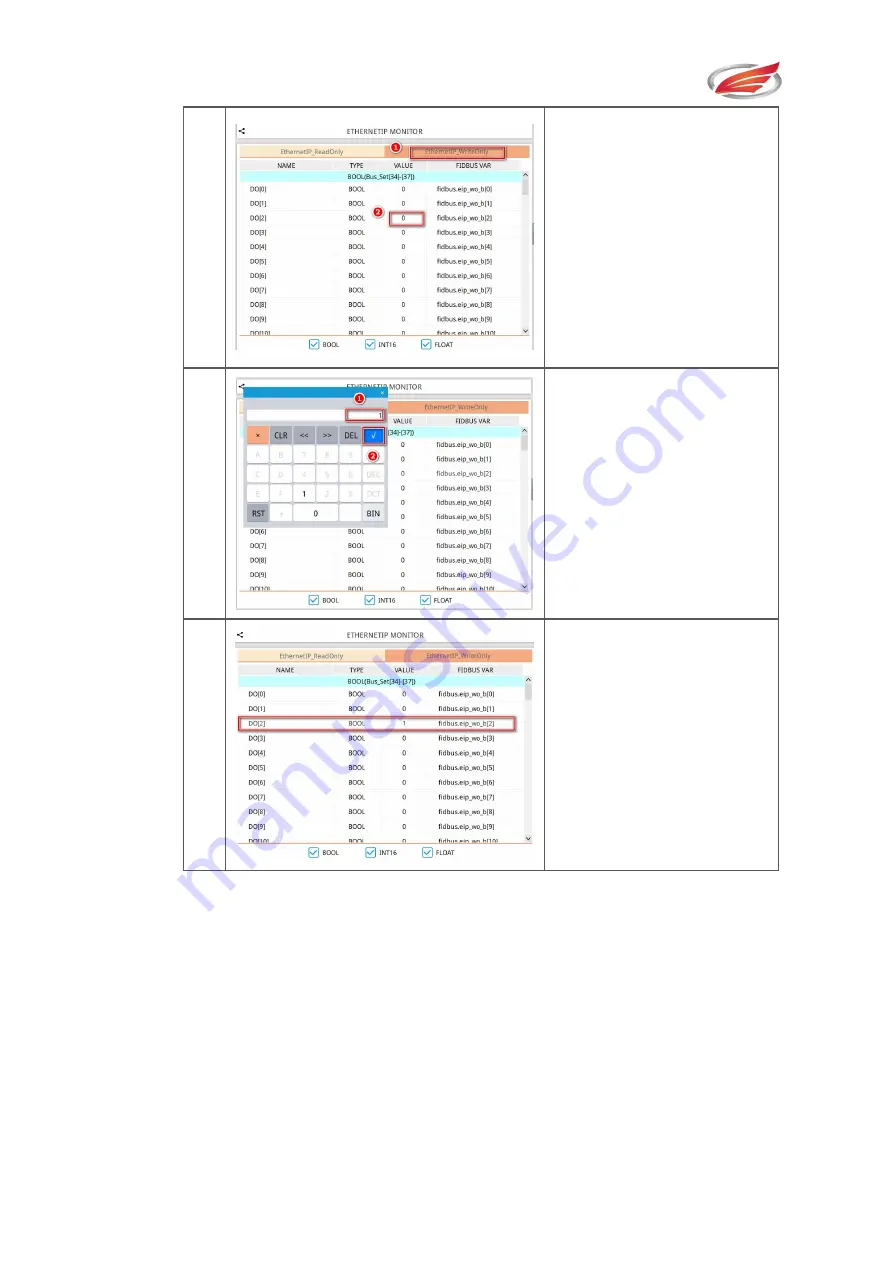
1. The data output list will b
e shown when clicking the "E
thernetIP write only".
2. Click "value" column of th
e variable need to be outputte
d to enable the editor. (Take
BOOL variable as an exampl
e)
2
1. Input a value by using the
pop-up keyboard of editor;
2. Click "
√
" to confirm after
value input was finished.
3
1. After the variable value re
writing was confirmed, the ne
w value will be displayed in
the monitoring interface.
Ethernet/IP Protocols
The Ethernet/IP function supports that a robot can be connected as a slave system,
with the same IP address to controller. The controller has the default communicated
serial address 0, and the default port number 2222. The data storage uses
Small-Endian. Ethernet/IP function mainly includes two sections, the data receiving
end and the data sending end, which severally has 64 pieces of BOOL type, 6 pieces
of Int type and 24 pieces of Float type data ports. Users can read and write the PLC
data from the master station by teaching pendant programming.
From PLC to Robot
In signal transport from PLC to Robot, the PLC is as sending end, and the robot is
as receiving end. Data received mainly include the system variables and the TPU







































































