





























Programming module
EFORT INTELLIGENT EQUIPMENT CO.,LTD
39
Complete.
Note!
CALL command can call: subroutine, Module function, etc.
When programming, operations involving "calling" are all
implemented with CALL commands.
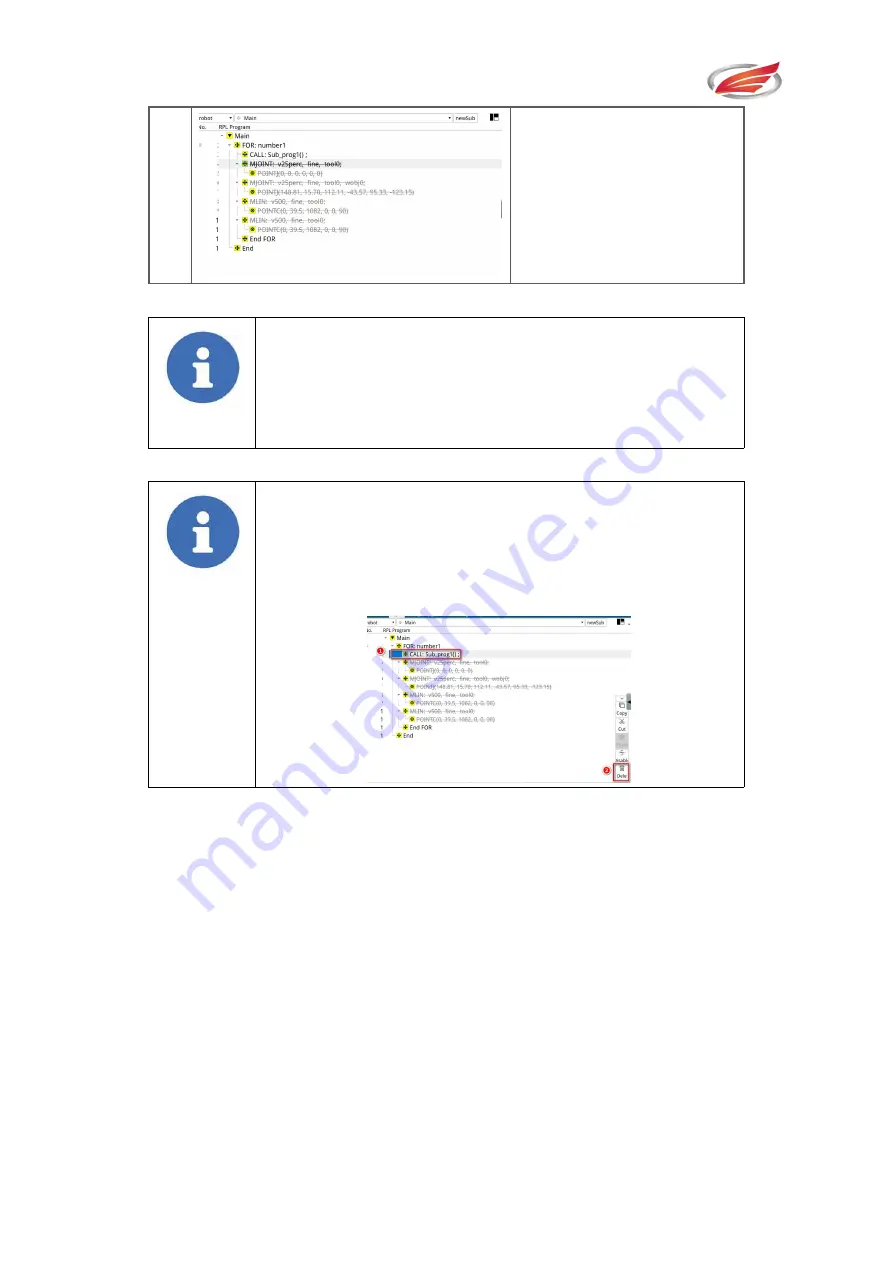
Note!
Subroutine delete operation: first switch the program structure
tree to the subroutine, then select the first line of the subroutine,
and finally click on the "Edit Bar/Delete" button.
4.2.4 Drag Teaching
Section 3.3.4 introduces the operation of dragging the robot. This section will explain
how to quickly insert the pose or motion trajectory of the robot into the program tree in
combination with the drag operation, that is, "drag teaching". There are two types of drag
teaching: teaching point and teaching track.
Drag Teaching Point
Prerequisite for starting drag
: the big arm and the forearm need to form a certain angle,
please use the JOG method to move the robot to the recommended posture in the figure
below.


































































