



















EDH0162En1040 – 05/99
9.2
MM4005
Index
Loops ..............................................4.13
Motion and position........................3.8
Stepper motor..................................1.9
Controller ...............................................1.6
activity – Read .............................3.142
Configuration ...................................2.7
extended status – Read...............3.143
Reset .............................................3.108
Responses ........................................3.6
status – Read................................3.139
version – Read .............................3.151
Conventions And Definitions ...............1.5
Copy variable .....................................3.201
CPU type .................................................1.9
Creating a Program .............................2.38
Creation – Command Line ..................2.39
cycle value and activate periodic dis-
play mode – Set..............................3.28
D
DC motor ..............................................4.28
control ..............................................1.9
Drivers ............................................4.31
decimal digits number of position dis-
play – Set ........................................3.84
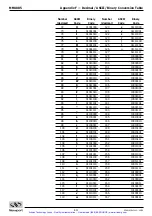
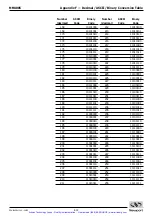
Decimal/ASCII/Binary Conversion Table .
8.30
Default..........................................................
Devices – Verifying........................1.22
Mode ...............................................6.20
Define ...........................................................
home ...............................................3.37
label.................................................3.38
radius for anarc of circle = ƒ (CR,
CA)...................................................3.31
sweep angle and build anarc of cir-
cle = ƒ (CR, CA) ..............................3.26
the maximum allowed angleof dis-
continuity .......................................3.18
the tangent angle for the first point
.........................................................3.52
the vector acceleration on trajectory
.......................................................3.152
the vector velocity on trajectory
.......................................................3.153
X position and build aline segment =
ƒ (LX, tangent) ...............................3.69
X position for aline segment = ƒ (MX,
MY)..................................................3.78
X position to reach with anarc of cir-
cle = ƒ (CX, CY) ..............................3.33
Y position and build aline segment =
ƒ (LY, tangent) ...............................3.70
Y position and build aline segment =
ƒ (MX, MY) .....................................3.79
Y position to reach and build anarc
of circle = ƒ (CX, CY) .....................3.34
Defining........................................................
Arcs ...................................................5.6
Lines..................................................5.6
Trajectory Elements........................5.5
Definition of Terms................................5.3
Definitions ...................................................
Conventions And .............................1.5
Specification.....................................4.4
Symbols and.....................................1.5
Delete one line of program...............3.174
derivative gain ............................................
factor – Read ................................3.169
Set....................................................3.63
device – Motion .....................................1.6
Digital filter parameters........................3.9
Dimensions...........................................1.10
Disable display refresh .....................3.104
displacement units – Read ...............3.135
Display ..................................................1.10
Display a variable ................................3.44
Configuration .................................1.16
function keys.........................1.16, 3.55
functions.........................................3.11
Organization...................................1.16
program error ................................3.45
refresh – Disable..........................3.104
refresh – Enable...........................3.105
Resolution ......................................2.29
strings on screen ...........................3.42
Status ..............................................1.17
Structure.........................................1.18
Zero .................................................2.32
Divide variables .................................3.186
Download EEPROM to RAM ...............3.74
Drivers ..................................................4.29
Stepper Motor................................4.29
E
Editing – Program ................................6.13
Edition of program ..............................3.48
EEPROM.......................................................
Failure while accessing the ............8.3
to RAM – Download.......................3.74
Element ........................................................
number under execution – Tell the....
3
.
2
3
Parameters – Trajectory.................5.9
Trajectory.........................................5.3
Elements Definition Commands –
Trajectory.......................................5.10
Emergency Language Reset .................2.9
Enable display refresh ......................3.105
Encoder...................................................1.6
Increment .......................................2.21
resolution – Read.........................3.141
Encoders...............................................4.21
End ...............................................................
position of generation of pulsesof
synchronisation – Set ...................3.94
While loop ....................................3.155
Erase.............................................................
the last element of trajectory ......3.46
program ........................................3.182
Error ........................................................4.5
At Stop (Not In Position) ................7.5
code – Read ..................................3.129
during home search cycle ..............8.3
During Motion – Following .............7.6
Following ..........................................4.4
line of program – Read................3.128
List.....................................................8.3
Maximum ........................................2.28
message – Read ...........................3.126
Messages ..........................................8.3
Reporting........................................6.13
Too Large – Following.....................7.5
Events to......................................................
Motion – Synchronizing..................6.3
Trajectory Elements – Synchronizing
...........................................................6.6
Trajectory Position – Synchronizing
...........................................................6.7
Execute a program ..............................3.51
Executing Sub-routines in a Program..6.18
Execution of ................................................
of a Trajectory ...............................5.10
of trajectory ...................................3.50
on Power-On – Automatic Program 6.9
Program ..........................................2.35
Unauthorized ...................................8.3
Extended list of the trajectory ...........3.68
F
Factor Saturation Level in Position PID
Loop Corrector – Integrator.........6.21
Factory Service ....................................8.33
Failure while accessing the EEPROM..8.3
Feed-Forward Loops ...........................4.15
filter parameters – Read ...................3.130
Firmware Updates ...............................6.13
First ..............................................................
Jog .....................................................2.4
Move..................................................2.5
Power On ........................................1.21
Flow control and sequencing.............3.10
Following Error ......................................4.4
During Motion ..................................7.6
Too Large .........................................7.5
Read ................................................3.36
Read maximum ............................3.171
Format – Command ...............................3.7
Front Panel Description......................1.15
Function..................................................1.9
Function key...........................................1.6
Common .........................................1.17
Display ...................................1.16, 3.55
line – Clear......................................3.54
Label................................................3.53
Wait for .........................................3.156
Functions .....................................................
Display ............................................3.11
Status ..............................................3.11
Fuses .....................................................1.10
G
Gain Saturation Limit – Integral.........6.13
General.........................................................
Concepts.........................................2.38
mode selection ................................3.8
parameters – Save .......................3.101
Setup .................................................2.7
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com







































































