





























14.4 Device Range that Can Be Set
14 - 65
INVERTER
C
O
NNE
CTION
14
command (WS3), write numerical values to device SP122 as necessary.
As the following figure shows, each operation mode is assigned to device SP122.
The following shows an example for Forward rotation command (WS1) and Low speed operation command (WS3).
*5
The SM device cannot be specified as a word device.
For the applicable SM devices, refer to the following.
➠
A800 PLC FUNCTION PROGRAMMING MANUAL
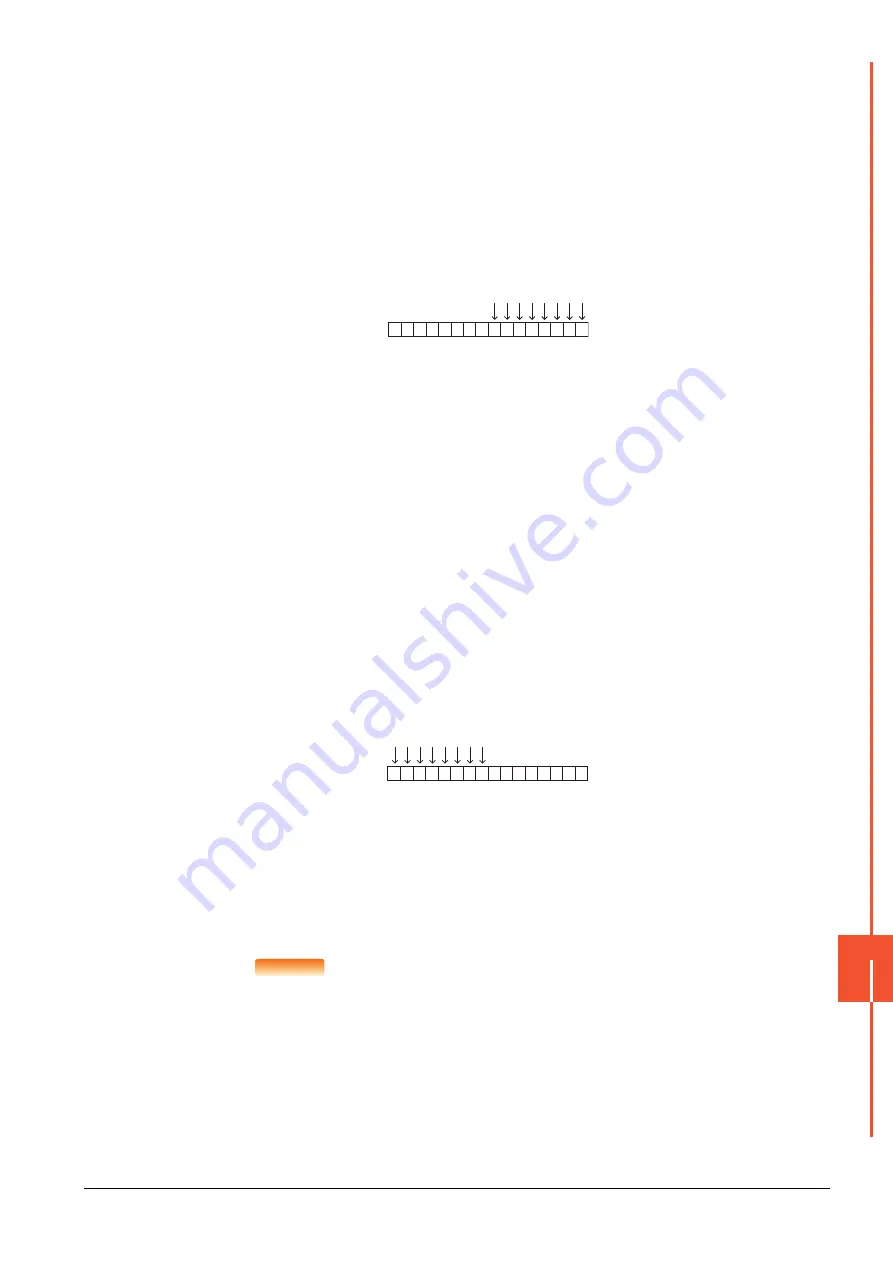
Write 1 to the bits of device SP122 that correspond to the Forward rotation command (WS1) and Low speed operation command
(WS3).
In this example, device SP122 must store 000AH.
Convert 000AH to a decimal value (10), and then write 10 to device SP122.
• Setting the JOG operation command (WS8), Selection of automatic restart after instantaneous power failure command (WS9),
Start self-holding selection command (WS10), and Reset command (WS11)
When setting the above commands, write values to device SP121 as necessary.
As shown in the figure below, each operation mode is assigned to a bit of device SP121.
The following shows an example of setting the Reset command (WS11).
Write 1 to the bit of device SP121 that corresponds to the Reset command (WS11).
In this example, device SP121 must store 0800H.
Convert 0800H to a decimal value (2048), and then write 2048 to device SP121.
When using a WS device, [Alternate] of a bit switch cannot be used.
Use [Momentary], [Set], and [Reset] for bit switch actions.
For the correspondences between the virtual inverter devices used in the GOT and the data of the inverter, refer to the
following.
➠
User's Manual of the used inverter (communication function (setting item and set data))
POINT
POINT
POINT
If the automatic connection fails
When [Automatic Negotiation] is set to [Yes] in the GOT communication settings, the inverter
parameters are reconfigured within the user-specified negotiation time.
If the automatic connection fails, set the longer negotiation time with GT Designer3 or the utility.
Device SP122
b15
b7
b0
0 0 0 0 0 0 0 0 0 0 0 0 1 0 1 0
WS7: Output stop(MRS)
WS6: Second function selection(RT)
WS5: High speed operation command(RH)
WS4: Middle speed operation command(RM)
WS3: Low speed operation command(RL)
WS2: Reverse rotation command(STR)
WS1: Forward rotation command(STF)
WS0: Current input selection(AU)
Device SP121
b15
b7
b0
0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0
WS15: Not used
WS14: Not used
WS13: Not used
WS12: Not used
WS11: Reset (RES)
WS10: Selection of automatic restart after instantaneous power failure (CS)
WS9: Start self-holding selection (STOP)
WS8: JOG operation (JOG)
Summary of Contents for GOT2000 Series
Page 2: ......
Page 84: ......
Page 432: ...6 58 6 6 Precautions ...
Page 578: ...9 54 9 6 Precautions ...
Page 726: ...12 84 12 5 Precautions ...
Page 756: ......
Page 822: ...14 66 14 4 Device Range that Can Be Set ...
Page 918: ...15 96 15 7 Precautions ...
Page 930: ...16 12 16 6 Precautions ...
Page 964: ......
Page 1002: ...19 38 19 7 Precautions ...
Page 1022: ...20 20 20 5 Precautions ...
Page 1023: ...MULTI CHANNEL FUNCTION 21 MULTI CHANNEL FUNCTION 21 1 ...
Page 1024: ......
Page 1054: ...21 30 21 5 Multi channel Function Check Sheet ...
Page 1055: ...FA TRANSPARENT FUNCTION 22 FA TRANSPARENT FUNCTION 22 1 ...
Page 1056: ......
Page 1223: ......







































































