





























X20 system modules • Motor controllers • X20SM1426
1998
X20 system User's Manual 3.10
Input counter value
Name:
ModulePowerSupplyError
StatusInput01 to StatusInput04
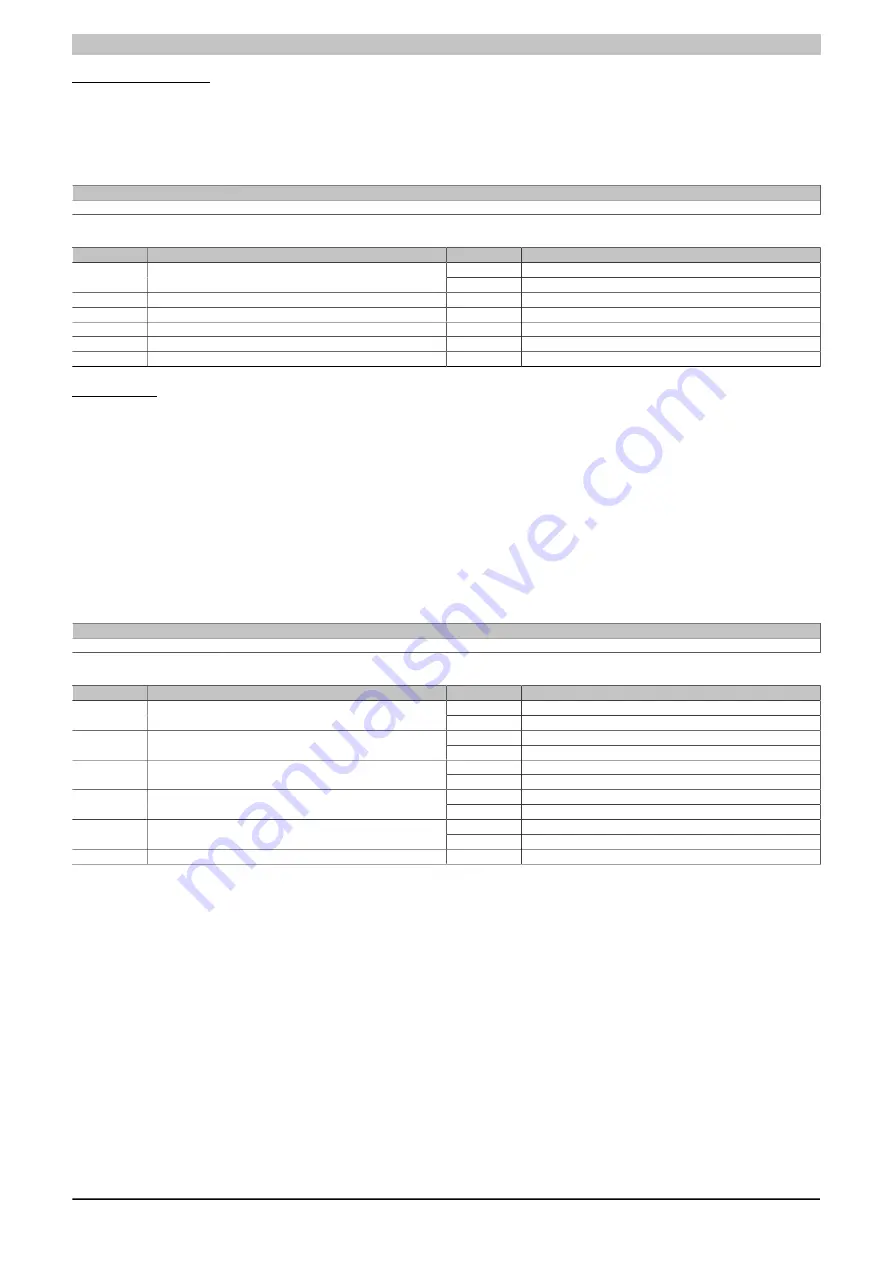
This register is used to indicate the status of the digital inputs and the counter.
Data type
Value
USINT
See bit structure.
Bit structure:
Bit
Description
Value
Information
0
OK
0
ModulePowerSupplyError
1
Module supply error
1
Reserved
0
2
StatusInput01
0 or 1
Input state - Digital input 1
...
...
5
StatusInput04
0 or 1
Input state - Digital input 4
6 - 7
Reserved
0
Error status
Name: The names of the bits are different depending on whether SDC information is enabled or disabled.
Without SDC
With SDC
StallError
StallError01
Overtemperature
Overtemperature01
ErrorCurrentError
ErrorCurrentError01
OvercurrentError
OvercurrentError01
-
DrvOK01
The current error status of the drive is indicated in this register. Each bit indicates a certain error or status. If an
error is registered in bits 0 to 3, then the corresponding bit remains set until the error has been acknowledged (see
"Module configuration 2" and "Error acknowledgment").
Data type
Value
UINT
See bit structure.
Bit structure:
Bit
Description
Value
Information
0
No stall
0
StallError(01)
1
Stall
0
No overtemperature
1
OvertemperatureError(01)
1
Overtemperature
0
No current error
2
CurrentError(01)
1
Current error
0
No overcurrent
3
OvercurrentError(01)
1
Overcurrent
0
An error was triggered for the motor axis
4
DrvOk0
1)
1
The drive is running error-free
5 - 15
Reserved
0
1)
Only when SDC information is enabled
Overtemperature error
The "Overtemperature" error bit can be set for the following reasons:
•
A specific temperature was exceeded near the channel due to overload
•
Module temperature exceeds 85°C
Current error
This error bit occurs whenever the required current cannot be supplied to the motor windings. This can be (but
is not necessarily) caused by an open line. At higher speeds (depending on the motor), this error can also occur
without an open line. In this case it is simply no longer possible to supply the desired current to the motor windings.
Because of the Back-EMF on the motor, this bit is set at slightly lower speeds if the motor is operated with no load
compared with full or partial loads.
Summary of Contents for X20 System
Page 2: ......






































































